Related algorithm
- Graph Breadth-First Search (BFS)
- Graph Depth-First Search (DFS)
- MST - Prim’s Algorithm
- MST - Kruskal’s Algorithm
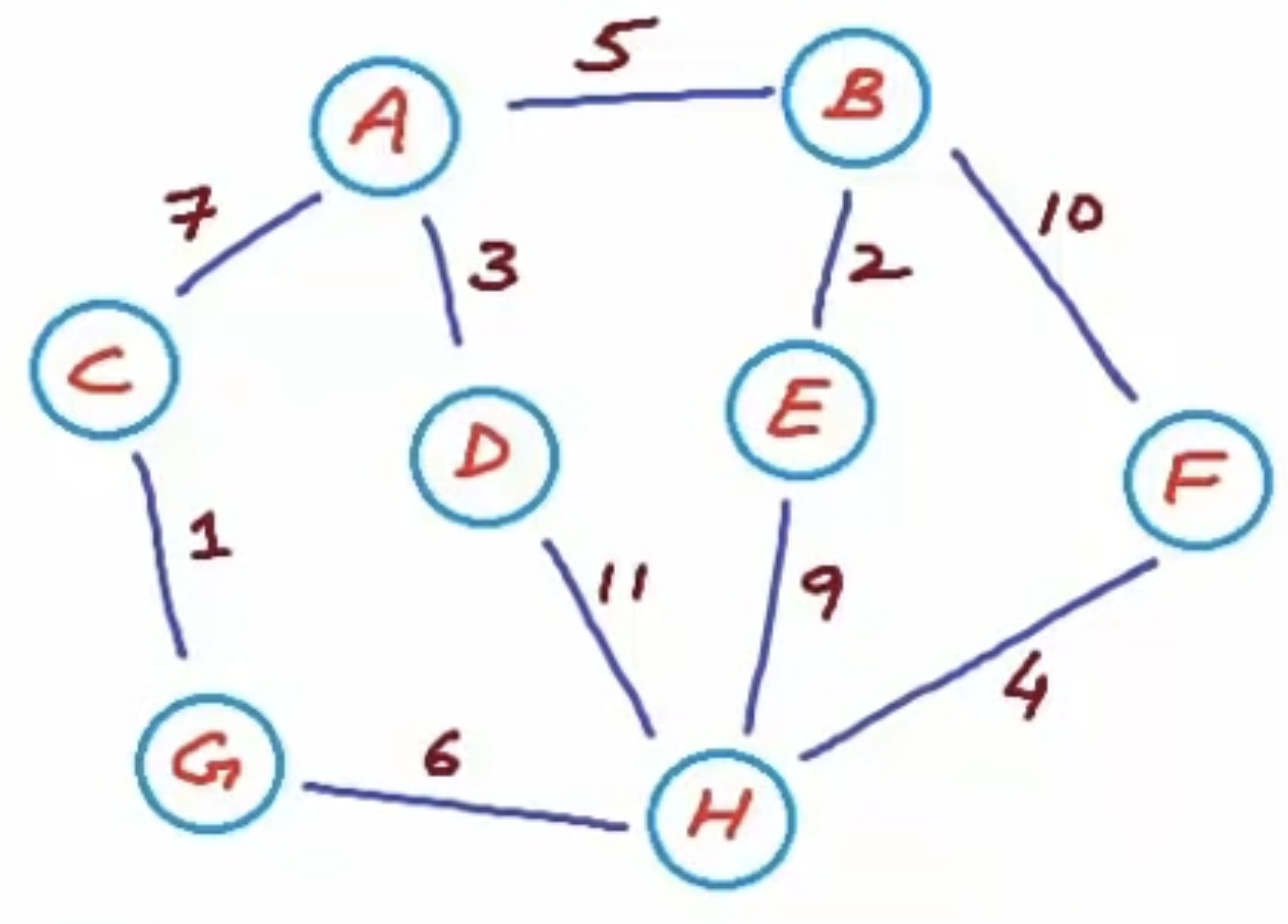
A graph is a type of nonlinear data structure, consisting of vertices and edges.
Types of graphs
Directed and undirected
Based on whether edges have directions, graphs can be divided into “directed graphs” and “undirected graph”.
- In directed graphs, edges represent a “bidirectional” connection between two vertices. For example, the friend relationship on Discord and WeChat.
- In directed graphs, edges have directions, the edges
A -> BandA <- Bhave different connotations. For example, the “follow” and “be followed” relationship on Instagram and TikTok.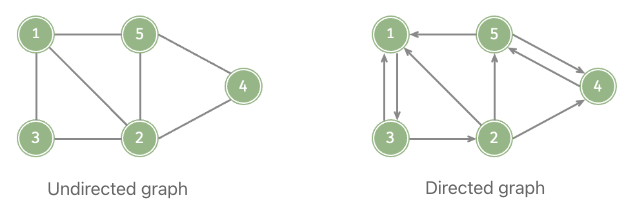
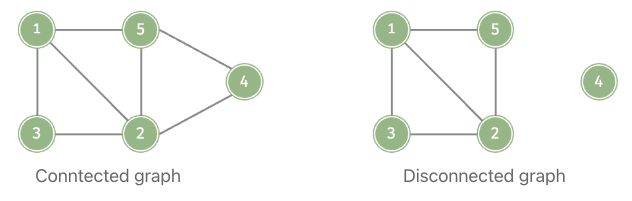
Connected and disconnected
Based on whether vertices are connected, graphs can be divided into “connected graphs” and “disconnected graphs”
- In connected graphs, it is possible to reach any other vertex starting from a certain vertex.
- In disconnected graphs, there is at least one vertex that connect be reached from a certain starting vertex.
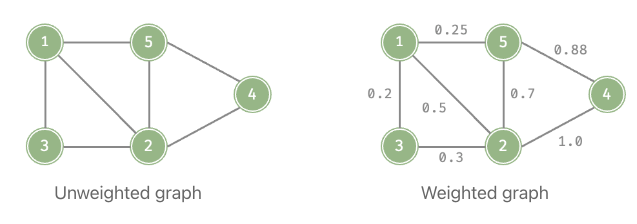
Weighted and unweighted
Graphs are categorised into “weighted graphs” and “unweighted graphs”.
- In weighted graphs, each edge is associated with a numerical value called a weight or cost. These weights represent some measure of the cost, distance, or value associated with traveling between vertices connected by the edge.
- Unweighted graphs, edges between vertices have no weight or cost.
Graph terminology
Undirected graph
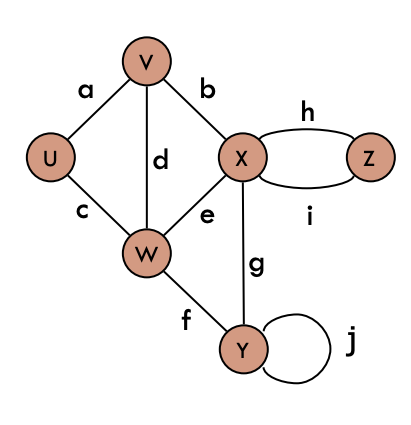
- Endpoints
- Edges connect endpoints (e.g. W and Y for edge f)
- Incident
- Edges are incident on endpoints (e.g. a, d, and b are incident on V)
- Adjacent
- Adjacent vertices are connected (e.g. U and V are adjacent)
- Degree
- Degree is the edges on a vertex (e.g. X has degree 5)
- Parallel edges
- Parallel edges share same endpoints (e.g. h and i are parallel edges)
- Self-loop
- Have only one endpoint (e.g. j is a self-loop)
- Simple
- Graph has no parallel or self-loops
Directed graph
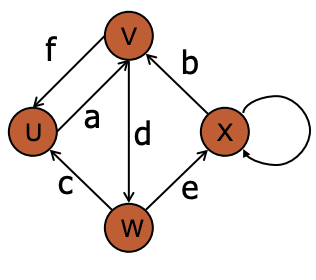 Edges in directed graphs go from tail to head (e.g. W is the tail of c and U is the head)
Edges in directed graphs go from tail to head (e.g. W is the tail of c and U is the head)
- Out-degree
- Number of edges go out from a vertex (e.g. W has out-degree 2)
- In-degree
- Number of edges go into a vertex (e.g. W has in-degree 1)
- Parallel edges
- Share tail and head (no parallel edges in the example)
- Self-loop
- Has same head and tail (e.g. X has a self-loop)
- Simple graph
- Directed graphs have no parallel edges or self-loops, but are allowed to have anti-parallel loops like f and a.
Cycle
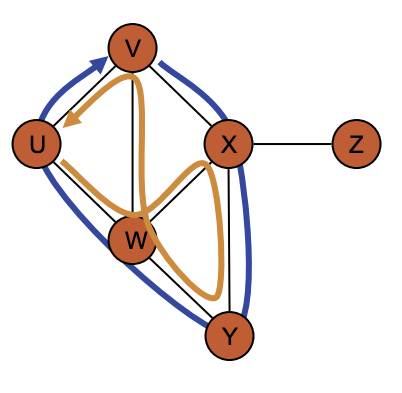 A cycle is defined by a path that starts and ends at the same vertex. (Path in orange)
A simple cycle is one where all vertices are distinct. (Path in blue)
A cycle is defined by a path that starts and ends at the same vertex. (Path in orange)
A simple cycle is one where all vertices are distinct. (Path in blue)
Graph concept
Trees and forests
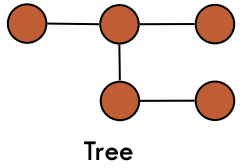 An unrooted tree
An unrooted tree T is a graph such that
Tis connectedThas no cycles- Every tree on
nvertices hasn-1edges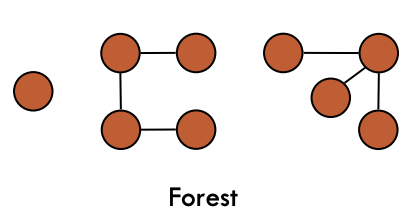 A forest is a graph without cycles. In other words, its connected components are trees.
A forest is a graph without cycles. In other words, its connected components are trees.
Spanning tree
A spanning tree is a tree that contains all the vertices of the original graph and some (or all) its edges, there might be several spanning trees possible. It must has no cycles.
Minimum Spanning Tree (MST)
A minimum spanning tree is the one with lowest total cost, represents the least expensive path connects all vertices. The number of edges in a minimum spanning tree should be where is the total number of vertices. The MST - Prim’s Algorithm and MST - Kruskal’s Algorithm are designed to find the MST in weighted undirected graphs.
Operations
numVertices()Returns the number of vertices of the graphvertices()Returns an iteration of all the vertices of the graphnumEdges()Returns the number of edges of the graphedges()Returns an iteration of all the edges of the graphgetEdge(u, v)Returns the edge from vertexuto the vertexv, if one exists; otherwise return null. For an undirected graph, there is no difference betweengetEdge(u, v)andgetEdge(v, u)endVertices(e)returns an array containing the two endpoint vertices of edgee. If a graph is directed, the first vertex is the original and the second is the destination.
Graph representation
Edge list
Store graph into a vertex list and a edge list. The vertex t contains the vertices in the graph; the edge list contains contains the vertices (nodes) that are connected by edges and the weight of the edge (if any).
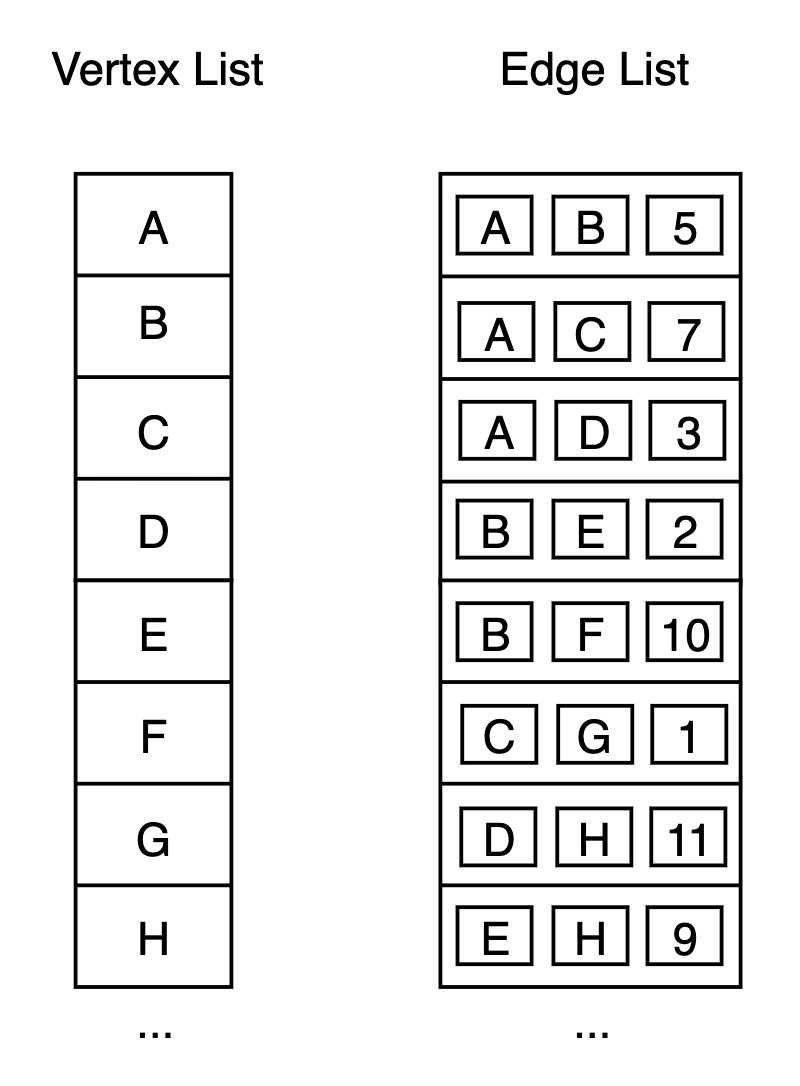 The vertices in the edge list are references to the vertices in the vertex list. But there is a better way of storing them using less memory, is by replacing the references with the indices of the vertices in the vertex list, like below.
The vertices in the edge list are references to the vertices in the vertex list. But there is a better way of storing them using less memory, is by replacing the references with the indices of the vertices in the vertex list, like below.
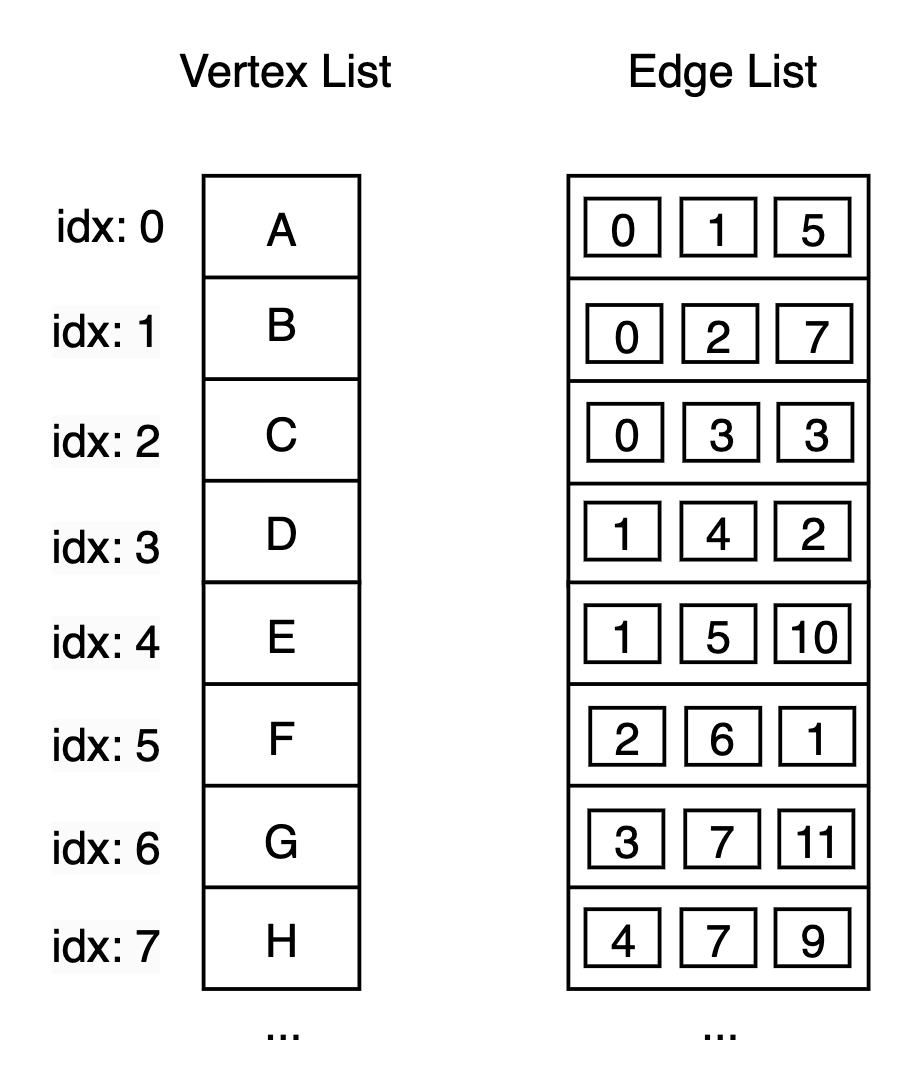 In undirected graph, the edge list entry for example
In undirected graph, the edge list entry for example 0 1 5 means the same as 1 0 5, therefore there is no need to have the another entry that represents the same edge. However, in directed graph they suggests different directions from A to B and from B to A.
Space complexity
The space complexity of vertex list can be described as where is the number of vertices.
The space complexity of edge list can be described as where is the number of edges.
The overall space complexity of the representation is .
Time complexity
- Add vertex:
- The insertion of vertex appends the new vertex to the end of the vertex list (recall that the time take for addition at the beginning and the end of linked list takes constant time)
- Add edge:
- Similar to insert vertex, the edge is appended to the end of the edge list.
- Get edge:
- Involves linear search through the edge list.
- Get vertex:
- Involves linear search through the vertex list.
The time complexity for addition takes time complexity of as the newly added item is appended to the end of the list. (recall that the time take for addition at the beginning and the end of linked list takes constant time). The time complexity for deletion, updating, and other common operation takes time for average case, due to the employment of linear search through the linked lists.
Adjacency matrix
Let the number of vertices in the graph be , the adjacency matrix uses an matrix to represent the graph, where each row and column represents a vertex, and the matrix elements represent edges, with 1 or 0 indicating whether there is an edge between two vertices if it is an unweighted graph.
The matrix uses the index of vertex that maps to the vertex in the vertex list. In Java, the adjacency matrix can be implemented using a 2D array int[numVertices][numVertices].
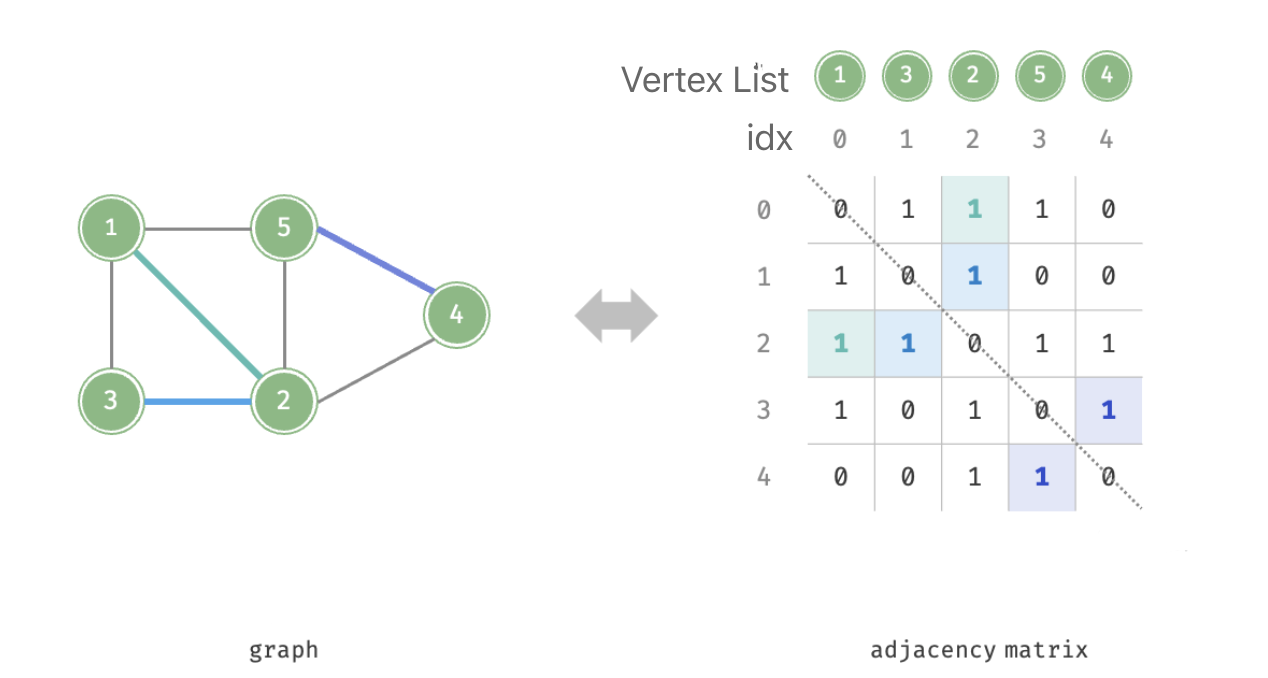 For any undirected graph, the adjacency matrix will be symmetric about the main diagonal. Replace the 1s and 0s in the matrix to weights can represent a weighted graph.
For any undirected graph, the adjacency matrix will be symmetric about the main diagonal. Replace the 1s and 0s in the matrix to weights can represent a weighted graph.
Implementation
public class GraphAdjMat {
private List<Integer> vertices;
private List<List<Integer>> adjMat; //adjacency matrix
private int numVertices;
public GraphAdjMat() {
this.adjMat = new ArrayList<>();
}
// return the number of vertices
public int size() {
return vertices.size();
}
public void addVertex(int val) {
numVertices++;
// add a new row to the matrix
// initialise the row with 0s
for (List<Integer> row : adjMat) {
row.add(0);
}
// add a new column to the matrix
List<Integer> newColumn = new ArrayList<>();
// initialise the column with 0s
for (int i=0; i<numVertices; i++) {
newColumn.add(0);
}
// append the column to the matrix
adjMat.add(newColumn);
}
// source and destination are indecies
// they are bidirectional because it is undirected graph
public void addEdge(int src, int dest) {
if (src < 0 || dest < 0 || src >= size() || dest >= size() || src == dest)
throw new IllegalArgumentException();
adjMat.get(src).set(dest, 1);
adjMat.get(dest).set(src, 1);
}
public void removeVertex(int index) {
if (index >= size())
throw new IllegalArgumentException();
vertices.remove(index);
// remove the vertex from the column
adjMat.remove(index);
// remove the vetex from the row
for (List<Integer> rwo : adjMat) {
row.remove(index);
}
}
public void removeEdge(int src, int dest) {
if (src < 0 || dest < 0 || src >= size() || dest >= size() || src == dest)
throw new IllegalArgumentException();
adjMat.get(src).set(dest, 0);
adjMat.get(dest).set(src, 0);
}
}Space complexity
The space taken of adjacency matrix is for storing a matrix.
Time complexity
- Add vertex:
- Adding new vertex to a matrix involves inserting increase the size of the matrix from to . To achieve this we need to copy the entire matrix, which. takes time.
- Add edge:
- Add an edge from
itoj, by toggling the matrixm[i][j] = 1, which requires time.
- Add an edge from
- Remove a vertex:
- Remove a vertex from a matrix requires decreasing the size of the matrix from to . We need to copy the entire matrix.
- Remove an edge:
- Remove an edge from
itoj, by setting them[i][j] = 0.
- Remove an edge from
- Query edge:
- Check an edge given two vertices
iandj, the vertex can be obtained throughm[i][j].
- Check an edge given two vertices
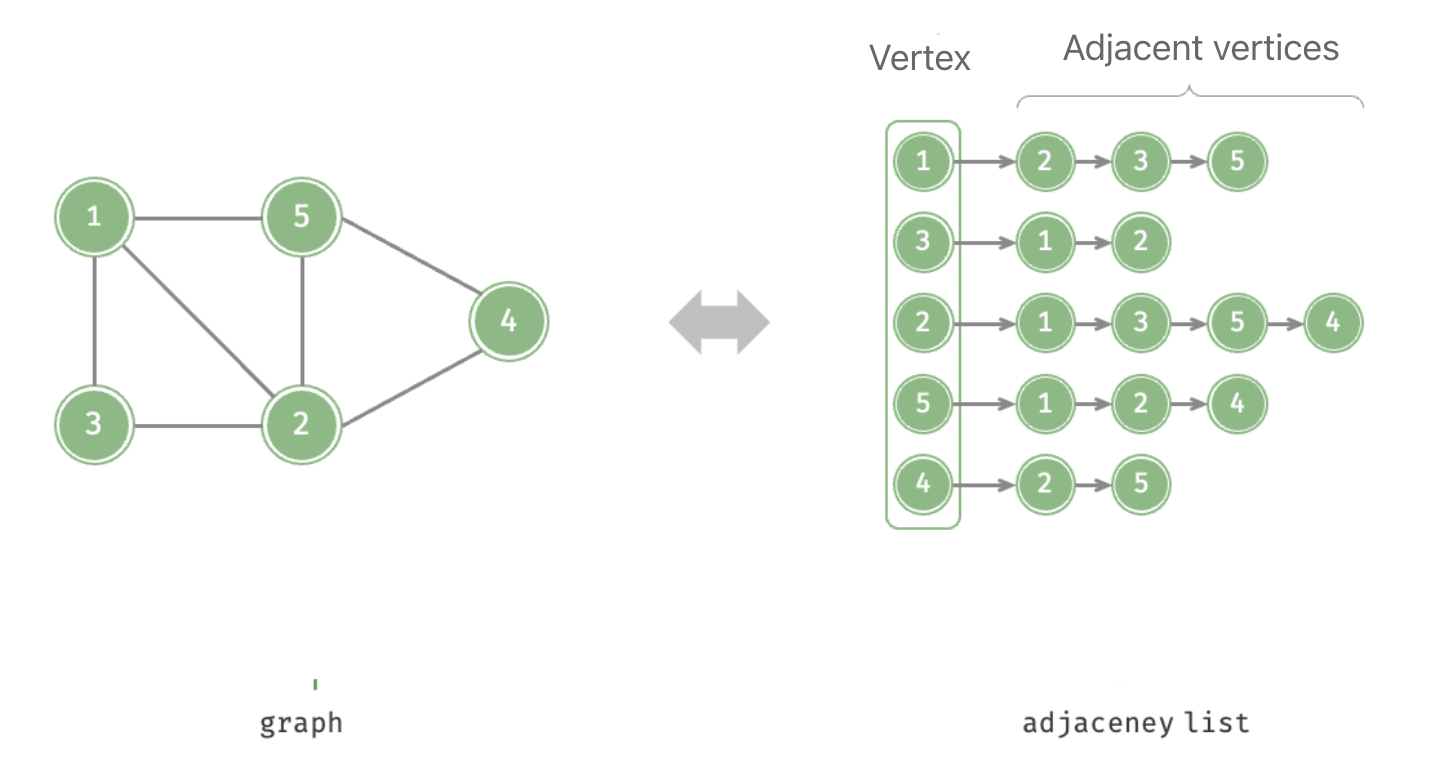
Adjacency list
Adjacency list uses linked lists to represent the graph, with each linked list node representing a vertex, the linked list contains all adjacent vertices of that vertex.
 The adjacency list is very similar to the [[Hash Table#|chaining]] in hash tables, hence we can use similar methods to optimise efficiency. For example, when the linked list is too long, it can be transformed into an AVL tree or red-black tree, optimising the time efficiency for retrieval from to ; the linked list can also be transformed into a hash table, thus reducing the time complexity to .
The implementation of adjacency list has two variations, either using linked lists to store vertices and their respective adjacency vertices or using hash map to map vertices to their adjacent vertices; generally, hash table implementation provides better efficiency in terms of time.
The adjacency list is very similar to the [[Hash Table#|chaining]] in hash tables, hence we can use similar methods to optimise efficiency. For example, when the linked list is too long, it can be transformed into an AVL tree or red-black tree, optimising the time efficiency for retrieval from to ; the linked list can also be transformed into a hash table, thus reducing the time complexity to .
The implementation of adjacency list has two variations, either using linked lists to store vertices and their respective adjacency vertices or using hash map to map vertices to their adjacent vertices; generally, hash table implementation provides better efficiency in terms of time.
Implementation (hash table)
public class Graph_AdjList {
// vertex maps to their adjacency list
private Map<Integer, List<Integer>> adjList;
public Graph_AdjList() {
adjList = new HashMap<>();
}
public void addVertex(int v) {
adjList.put(v, new LinkedList<>());
}
public void addEdge(int v, int w) {
adjList.get(v).add(w); // add w to v's list
adjList.get(w).add(v);
}
public void removeVertex(int v) {
if (!adjList.containsKey(v))
return;
// remove v from adjacency lists of all its neighbours
for (int neighbour : adjList.get(v)) {
adjList.get(neighbour).remove(Integer.valueOf(v));
}
// remove the v and its associated adjacency list
adjList.remove(v);
}
public void removeEdge(int v, int w) {
if (adjList.containsKey(v)) {
// remove w from v's list
adjList.get(v).remove(Integer.valueOf(w));
}
if (adjList.containsKey(w)) {
adjList.get(w).remove(Integer.valueOf(v));
}
}
}Space complexity (hash table)
To store each vertex in the graph, this requires a hash table with number of buckets .
For each vertex, you need space to store a list of its neighbours. In a simple, undirected graph, each edge connects two vertices, when counting edges, each edge is counted twice, once for each endpoint vertex (A -> B, B <- A). Therefore, the space required is .
The total space complexity for adjacency list is , since is proportional to and are both considered as linear time cost.
Time complexity (hash table)
- Add vertex:
- Add a vertex to the hash table, takes constant time.
- Add edge:
- Finds the corresponding vertices and adds adjacent vertex to it takes constant time. Look at on the hash table takes time, and append vertex to tail its adjacent vertex list takes time.
- Remove edge: O(1)
- Remove an edge involves remove it from two of its incident vertices, which takes time.
- Remove vertex:
- Remove a vertex involves traversing each adjacency vertex list among all buckets and remove the vertex from them, the number of vertices to travers is proportional to the total number of vertices .
- Query:
- To check for an edge we need to check for vertices adjacent to given vertex. A vertex can have at most neighbours and in worst can we would have to check for every adjacent vertex.
Back to parent node: Data Structures and Algorithms
Reference: